Improving Simulation and Performance with an Advanced Physics Solver
by chefdeletat
Product & Tech
 In mid-2015, Roblox unveiled a major upgrade to its physics engine: the Projected Gauss-Seidel (PGS) physics solver. For the first year, the new solver was optional and provided improved fidelity and greater performance compared to the previously used spring solver.
In mid-2015, Roblox unveiled a major upgrade to its physics engine: the Projected Gauss-Seidel (PGS) physics solver. For the first year, the new solver was optional and provided improved fidelity and greater performance compared to the previously used spring solver.
In 2016, we added support for a diverse set of new physics constraints, incentivizing developers to migrate to the new solver and extending the creative capabilities of the physics engine. Any new places used the PGS solver by default, with the option of reverting back to the classic solver.
We ironed out some stability issues associated with high mass differences and complex mechanisms by the introduction of the hybrid LDL-PGS solver in mid-2018. This made the old solver obsolete, and it was completely disabled in 2019, automatically migrating all places to the PGS.
In 2019, the performance was further improved using multi-threading that splits the simulation into jobs consisting of connected islands of simulating parts. We still had performance issues related to the LDL that we finally resolved in early 2020.
The physics engine is still being improved and optimized for performance, and we plan on adding new features for the foreseeable future.
Implementing the Laws of Physics

The main objective of a physics engine is to simulate the motion of bodies in a virtual environment. In our physics engine, we care about bodies that are rigid, that collide and have constraints with each other.
A physics engine is organized into two phases: collision detection and solving. Collision detection finds intersections between geometries associated with the rigid bodies, generating appropriate collision information such as collision points, normals and penetration depths. Then a solver updates the motion of rigid bodies under the influence of the collisions that were detected and constraints that were provided by the user.

The motion is the result of the solver interpreting the laws of physics, such as conservation of energy and momentum. But doing this 100% accurately is prohibitively expensive, and the trick to simulating it in real-time is to approximate to increase performance, as long as the result is physically realistic. As long as the basic laws of motion are maintained within a reasonable tolerance, this tradeoff is completely acceptable for a computer game simulation.
Taking Small Steps
The main idea of the physics engine is to discretize the motion using time-stepping. The equations of motion of constrained and unconstrained rigid bodies are very difficult to integrate directly and accurately. The discretization subdivides the motion into small time increments, where the equations are simplified and linearized making it possible to solve them approximately. This means that during each time step the motion of the relevant parts of rigid bodies that are involved in a constraint is linearly approximated.
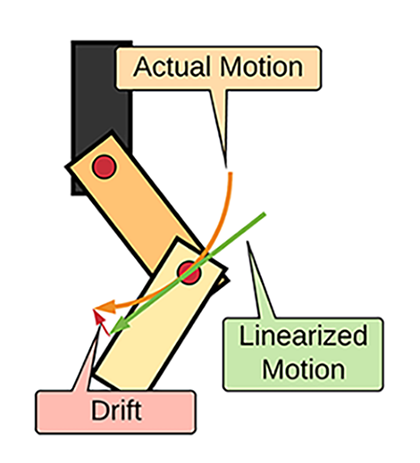
Although a linearized problem is easier to solve, it produces drift in a simulation containing non-linear behaviors, like rotational motion. Later we’ll see mitigation methods that help reduce the drift and make the simulation more plausible.
Solving
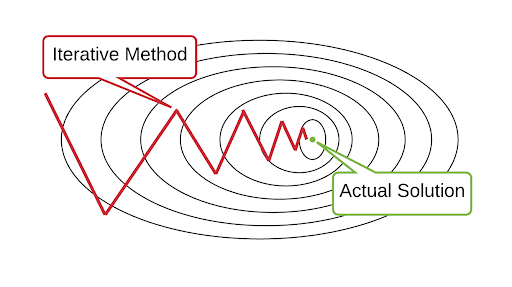
Having linearized the equations of motion for a time step, we end up needing to solve a linear system or linear complementarity problem (LCP). These systems can be arbitrarily large and can still be quite expensive to solve exactly. Again the trick is to find an approximate solution using a faster method. A modern method to approximately solve an LCP with good convergence properties is the Projected Gauss-Seidel (PGS). It is an iterative method, meaning that with each iteration the approximate solution is brought closer to the true solution, and its final accuracy depends on the number of iterations.
This animation shows how a PGS solver changes the positions of the bodies at each step of the iteration process, the objective being to find the positions that respect the ball and socket constraints while preserving the center of mass at each step (this is a type of positional solver used by the IK dragger). Although this example has a simple analytical solution, it’s a good demonstration of the idea behind the PGS. At each step, the solver fixes one of the constraints and lets the other be violated. After a few iterations, the bodies are very close to their correct positions. A characteristic of this method is how some rigid bodies seem to vibrate around their final position, especially when coupling interactions with heavier bodies. If we don’t do enough iterations, the yellow part might be left in a visibly invalid state where one of its two constraints is dramatically violated. This is called the high mass ratio problem, and it has been the bane of physics engines as it causes instabilities and explosions. If we do too many iterations, the solver becomes too slow, if we don’t it becomes unstable. Balancing the two sides has been a painful and long process.
Mitigation Strategies
 A solver has two major sources of inaccuracies: time-stepping and iterative solving (there is also floating point drift but it’s minor compared to the first two). These inaccuracies introduce errors in the simulation causing it to drift from the correct path. Some of this drift is tolerable like slightly different velocities or energy loss, but some are not like instabilities, large energy gains or dislocated constraints.
A solver has two major sources of inaccuracies: time-stepping and iterative solving (there is also floating point drift but it’s minor compared to the first two). These inaccuracies introduce errors in the simulation causing it to drift from the correct path. Some of this drift is tolerable like slightly different velocities or energy loss, but some are not like instabilities, large energy gains or dislocated constraints.
Therefore a lot of the complexity in the solver comes from the implementation of methods to minimize the impact of computational inaccuracies. Our final implementation uses some traditional and some novel mitigation strategies:
- Warm starting: starting with the solution from a previous time-step to increase the convergence rate of the iterative solver
- Post-stabilization: reprojecting the system back to the constraint manifold to prevent constraint drift
- Regularization: adding compliance to the constraints ensuring a solution exists and is unique
- Pre-conditioning: using an exact solution to a linear subsystem, improving the stability of complex mechanisms
Strategies 1, 2 and 3 are pretty traditional, but 3 has been improved and perfected by us. Also, although 4 is not unheard of, we haven’t seen any practical implementation of it. We use an original factorization method for large sparse constraint matrices and a new efficient way of combining it with the PGS. The resulting implementation is only slightly slower compared to pure PGS but ensures that the linear system coming from equality constraints is solved exactly. Consequently, the equality constraints suffer only from drift coming from the time discretization. Details on our methods are contained in my GDC 2020 presentation. Currently, we are investigating direct methods applied to inequality constraints and collisions.
Getting More Details
Traditionally there are two mathematical models for articulated mechanisms: there are reduced coordinate methods spearheaded by Featherstone, that parametrize the degrees of freedom at each joint, and there are full coordinate methods that use a Lagrangian formulation.
We use the second formulation as it is less restrictive and requires much simpler mathematics and implementation.
The Roblox engine uses analytical methods to compute the dynamic response of constraints, as opposed to penalty methods that were used before. Analytics methods were initially introduced in Baraff 1989, where they are used to treat both equality and non-equality constraints in a consistent manner. Baraff observed that the contact model can be formulated using quadratic programming, and he provided a heuristic solution method (which is not the method we use in our solver).
Instead of using force-based formulation, we use an impulse-based formulation in velocity space, originally introduced by Mirtich-Canny 1995 and further improved by Stewart-Trinkle 1996, which unifies the treatment of different contact types and guarantees the existence of a solution for contacts with friction. At each timestep, the constraints and collisions are maintained by applying instantaneous changes in velocities due to constraint impulses. An excellent explanation of why impulse-based simulation is superior is contained in the GDC presentation of Catto 2014.
The frictionless contacts are modeled using a linear complementarity problem (LCP) as described in Baraff 1994. Friction is added as a non-linear projection onto the friction cone, interleaved with the iterations of the Projected Gauss-Seidel.
The numerical drift that introduces positional errors in the constraints is resolved using a post-stabilization technique using pseudo-velocities introduced by Cline-Pai 2003. It involves solving a second LCP in the position space, which projects the system back to the constraint manifold.
The LCPs are solved using a PGS / Impulse Solver popularized by Catto 2005 (also see Catto 2009). This method is iterative and considers each individual constraints in sequence and resolves it independently. Over many iterations, and in ideal conditions, the system converges to a global solution.
Additionally, high mass ratio issues in equality constraints are ironed out by preconditioning the PGS using the sparse LDL decomposition of the constraint matrix of equality constraints. Dense submatrices of the constraint matrix are sparsified using a method we call Body Splitting. This is similar to the LDL decomposition used in Baraff 1996, but allows more general mechanical systems, and solves the system in constraint space. For more information, you can see my GDC 2020 presentation.
The architecture of our solver follows the idea of Guendelman-Bridson-Fedkiw, where the velocity and position stepping are separated by the constraint resolution. Our time sequencing is:
- Advance velocities
- Constraint resolution in velocity space and position space
- Advance positions
This scheme has the advantage of integrating only valid velocities, and limiting latency in external force application but allowing a small amount of perceived constraint violation due to numerical drift.
An excellent reference for rigid body simulation is the book Erleben 2005 that was recently made freely available. You can find online lectures about physics-based animation, a blog by Nilson Souto on building a physics engine, a very good GDC presentation by Erin Catto on modern solver methods, and forums like the Bullet Physics Forum and GameDev which are excellent places to ask questions.
In Conclusion
The field of game physics simulation presents many interesting problems that are both exciting and challenging. There are opportunities to learn a substantial amount of cool mathematics and physics and to use modern optimizations techniques. It’s an area of game development that tightly marries mathematics, physics and software engineering.
Even if Roblox has a good rigid body physics engine, there are areas where it can be improved and optimized. Also, we are working on exciting new projects like fracturing, deformation, softbody, cloth, aerodynamics and water simulation.
Neither Roblox Corporation nor this blog endorses or supports any company or service. Also, no guarantees or promises are made regarding the accuracy, reliability or completeness of the information contained in this blog.
This blog post was originally published on the Roblox Tech Blog.